激光雷达是什么?G7数字货舱2.0为何要使用它?
近日,特斯拉与小鹏汽车的创始人又因「抄袭」话题在网络上隔空喊话,二人频上热搜的同时也带火了一个技术名词——激光雷达。这已经是该词汇在今年的第二次网络热议。
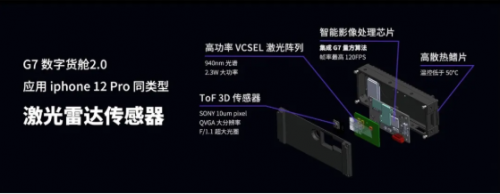
两个月前,苹果公司三大新品发布,其中的主力机型 iPhone12 Pro 就搭载了激光雷达技术,引发众多网友的硬核讨论。而一周后的10月16日,在G7数字货舱科技日上,我们也正式发布了新一代(快递快运)智能挂车量方解决方案——数字货舱量方2.0——同样应用了激光雷达技术。
那么,激光雷达到底有何过人之处,让Tesla、小鹏汽车、苹果这些科技公司纷纷使用?G7 作为根植于物流行业的科技公司,为何也要引入这项技术?
先来了解「激光雷达技术」是什么?
激光雷达(Lidar),英文全称为 Laser Detecting and Ranging,即激光探测和测距。是一种通过测量激光发出和收到回波的时间差,确定目标方位和距离的前沿感知技术。它可探测目标物体的距离、方位、高度、速度、姿态、形状等参数。因其分辨率高、抗干扰能力强、不受光线影响、体积小质量轻等优势,主要应用于需要精密测量的智能制造与电子产品领域。
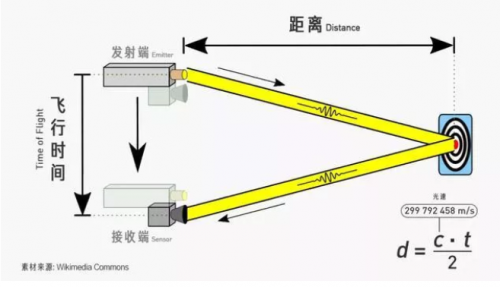

为进一步说明它的作用,我们以激光雷达自动驾驶领域和 iPhone12 Pro 的应用举例。iPhone 12 Pro 配备的激光雷达主要用于AR增强现实以及影像系统上。激光雷达扫描仪可发射出人眼不可见的激光束,遇到物体时会反射回来,结合光速,可以计算出距离物体的距离。借助这种深度感知能力,苹果手机可以在暗光环境下,更加快速、精准地对焦,同时识别物体的前后关系,从而完成对被摄物体的精准捕捉与3D建模。以同样的原理,G7 数字货舱应用的激光雷达在挂车厢体内完成对货物的精准捕捉与体积测量,从而帮助管理者对厢内空间利用率的监督与把控。

而在自动驾驶领域,激光雷达作为关键的传感器主要用于精准感知道路环境,构建汽车周围环境的3D模型。得益于激光雷达的产品特性,它在极端环境条件下(大雨、大雪、大雾)的夜间或照明不足的场景中仍能运行,可以区分静止或运动的物体,准确分辨出物体的大小,避免交通事故。

G7数字货舱为什么要用激光雷达?
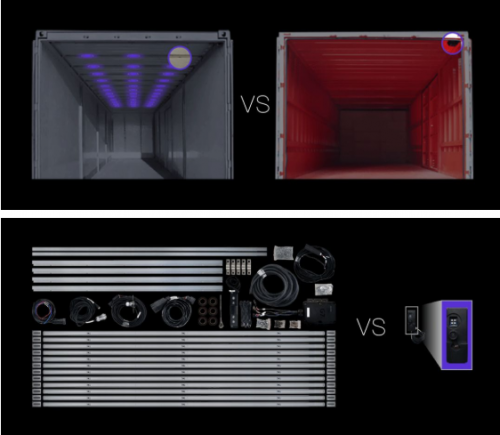
G7数字货舱利用激光雷达结构简单、测量精准度高的特点,将其作为「量方2.0」的核心技术解决方案,使产品在对于厢车的体积装载率精准测量的前提下,成本得以大幅下降,而成为一个可以普惠行业的应用。
在新一代的解决方案中,一台135方的挂车,量方所需的传感器直接从36个减少到1个,单车的安装时间下降87%,综合物料成本下降67%
搭载激光雷达的量方2.0
将适用于哪些场景?
拼车结算
在拼车运输场景下,运费结算一般按照货物的体积和重量来计算,通过人工录入、目测方式往往存在误差。通过量方2.0可以准确获得货物的量方数据,从而实现更精准的结算。
配载优化
配载的质量直接影响到运输成本,在人工测量的情况下,准确性无法保证,优化配载没有抓手,依靠量方2.0可以实现货物的装载体积可知,为优化配载提供数据依据,实现精细化管理。
装载率提升
在人工现场监督装卸货的情况下,因为操作不规范而导致的装载率低的问题,无法被充分发现,“砌墙”式的装货时有发生。通过量方2.0可以准确还原装卸过程,管理人员有的放矢。
有了硬件技术就行了吗?算法更重要正如激光雷达技术在自动驾驶与苹果手机上的不同应用。硬件为挂车的装载率提升提供了底层能力,但想要充分发挥它的潜力,还需要结合行业特点与应用场景做深入、持久的算法层面的能力升级。
识别搬运过程间隙,数字化还原装载全过程
为了能够准确识别出货物码放过程中存在的不合理间隙,G7算法团队通过「过程还原算法」开发出「动态间隙识别技术」,使系统能够自动记录货物动态搬运过程中激光雷达回收的点云数据和位置信息,通过末端计算与云计算的协同配合,计算出物体之间的间隙数据,实现装载过程的数字化还原。

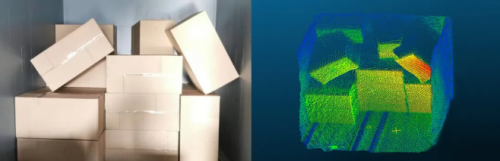
全域扫描,长距离成像
面阵式激光雷达系统虽然具备对于目标物体快速、精准扫描成像能力,但因其技术特性,一般只适用于短距离的物体探测,G7 算法团队针对这一问题,结合全域激光扫描算法,有效解决了距离、精准度之间的矛盾,能够实现对整个车厢进行精准的3D扫描。
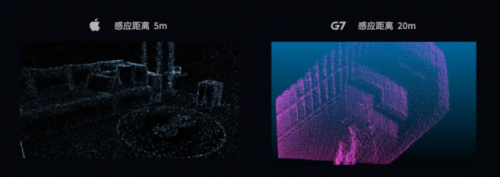
G7数字货舱的工业级激光雷达可对挂车进行长距离感应
修正大角度镜头畸变,还原全景真实画面
使用大角度镜头拍摄照片时,一般在图像边缘容易发生扭曲变形,这种现象同样发生在激光雷达的三维成像中。为了实现使用一枚探测器就能可完成对于车厢全景的大角度准确成像,G7算法团队通过「镜头畸变修正算法」克服了这一难题,实现镜头畸变的准确还原。
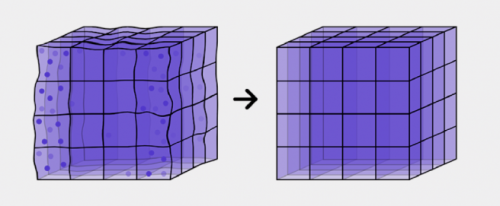
镜头畸变修正算法使图像准确还原


A5创业网 版权所有